Exoskeleton Test Bed
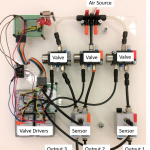
The exoskeleton test bed provides an open-source guide for researchers interested in using our test bed for their respective exoskeleton or pneumatically-powered projects. Included are requisite mechanical drawings, software files, electrical schematics and list of components along with a detailed procedure to build the mannequin and the controller board.
Gait Trainer (ME 470 Senior Design Capstone Project – Fall 2019)

Gait trainers (mobility aids that provide constant support) for adults currently on the market are limited, bulky, expensive, and hard to obtain without a prescription. The J-Walk is our team’s solution to this issue. Its design is based on making simple, inexpensive, yet effective modifications to an existing walker, the Triumph Escape. These modifications are able to be easily altered so that the design can accommodate a range of heights.